
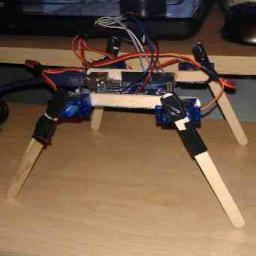
One of the earlier articles I wrote for this website was for a Cheap Robot, where I set out to create a robot for £10. The idea was to create a cheap robot platform for testing out ideas for autonomous robotics.
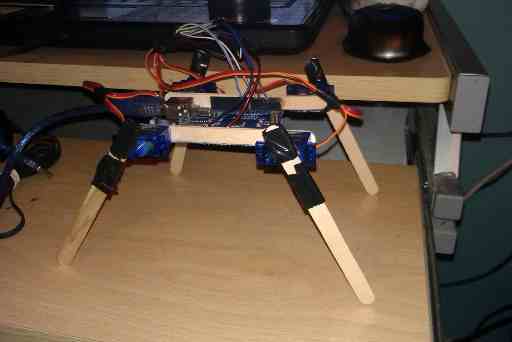
I was recently going through my old equipment and found both the original robot, and many of the SG90 servos I didn’t use. I thought that given 8 years, could I do a better job?
Since I created the original robot, a few things have changed in the 8 years since the original project…
3D printers became better and more affordable. So much so, I recently purchased a second-hand one for just £90, which is proving to be quite a capable little machine.
I have since learned OpenScad, a 3D modelling CAD software that you can program in a C-family-esque language.
This all said, I can now build cheap arbitrary structures cheaply (in both cost and time).
Since the original project, computation got better and cheaper. You can now get for less price an Arduino Nano, which has a smaller footprint and is just as capable (in every way we care about). If we’re really pushed for cost and size, we could also consider the Digispark, which offers just enough pins to drive the motors.
For the same cost of an Arduino Uno (used in the original project), you can now look at getting something like a Raspberry Pi Zero (if you can find them). In theory this would also be capable of more complex behaviours. Better yet, it comes in smaller footprint than the Arduino Uno.
We now see lots of interesting and useful libraries for simulation and control, some of which is exceptionally useful for building autonomous systems.
Some of this includes simulations such as Gazebo and Webots. Neural networks help create autonomous behaviours, such as TensorFlow and Darknet.
These and many other libraries speed-up development and allow for focus on more important research areas.
My experience has grown immensely in this time. I designed and build an entire open source humanoid robotics platform from scratch, including the software to operate the thing.
This is by far the most valuable thing that 8 years has brought.
Recently I have been working on a new platform called uDog (“micro dog”), something that will allow me to research small robotic dogs.
The following are some renders for initial parts…
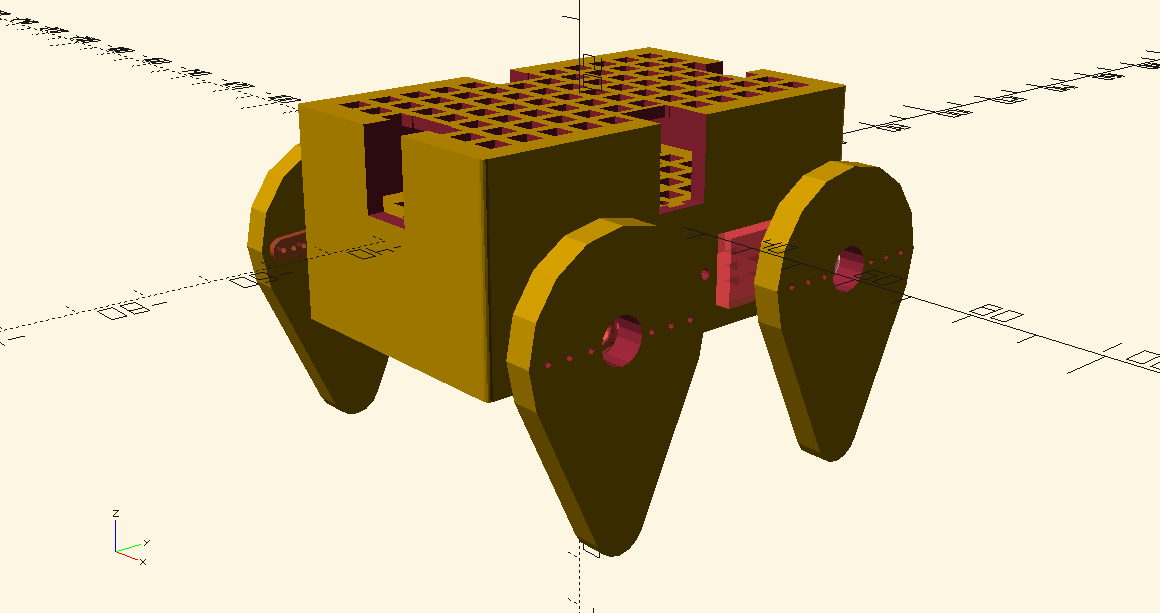
The platform is printed as three torso parts and four leg parts.
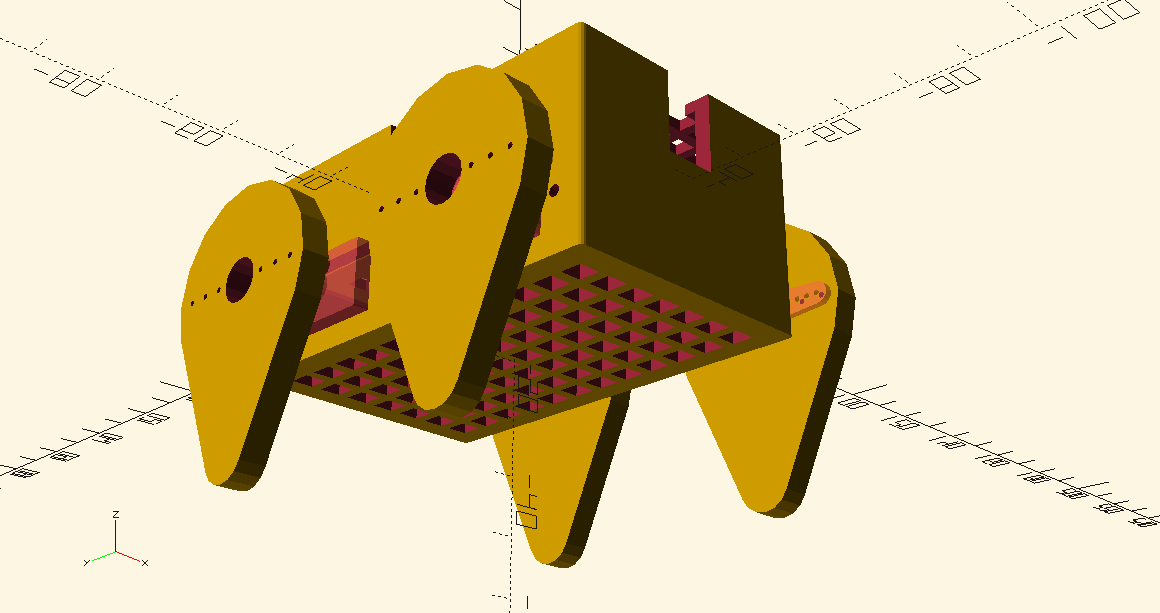
It is currently not designed for looks, but for adaptability. It’s not clear to me yet what the guts may contain and I am not sure how the leg structure may look.
Some initial ideas on the platform:
In terms of the future, I mentioned previously this was one of my goal projects. It could potentially act as the basis for a low-cost robot platform as I discussed in my start-up ideas.
Anyway, I will look to update here when more develops. (Progress may be slow and this is a side-side-side-side project!)