

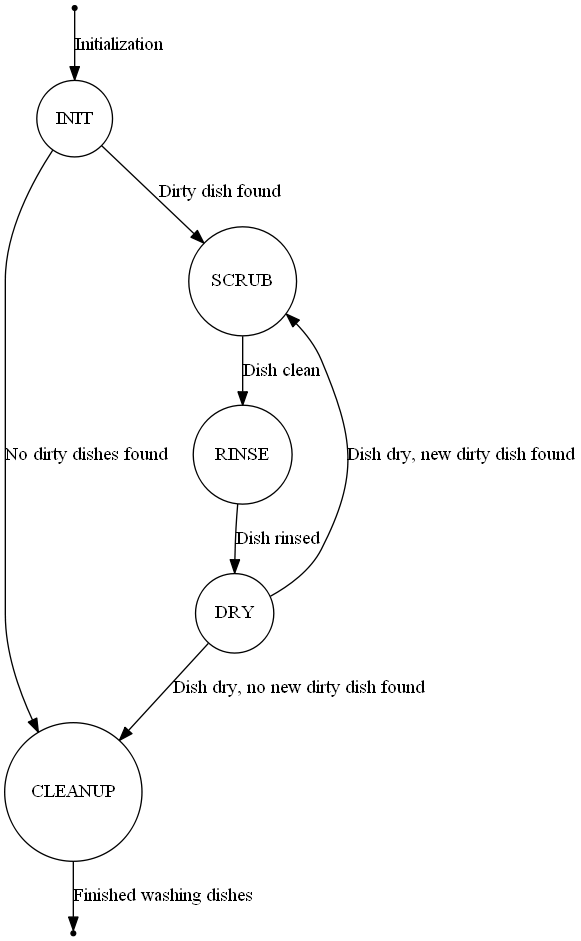
I recently read an article by Stephen Friederichs on Implementing State Machines, from all the way back in 2014 (which feels like yesterday at the time of writing). It’s a great read and I suggest for people to go and read it. I have kept with his state machine model as best I could, so please see the below image I copied from the site:
This got me thinking about my preferred design for state machine,
which is to use transition functions. Conceptually I think the idea is
quite clean, as the decision for each transaction is abstracted away
into their own functions. Better yet, somebody can’t sneak a
goto or continue, so the order of operations
is always clean.
I would also argue that runtime speed is also greatly improved for larger state machines, as we don’t have to check each case in a switch statement, but instead simply go straight to desired function.
The following is a breakdown of my alternative code…
0001 /* gcc -Wall -std=c99 state.c -o state */
0002
0003 #include <stdio.h> // Only for debugging
0004
0005 typedef enum{
0006 INIT = 0,
0007 GET_DISH,
0008 SCRUB,
0009 RINSE,
0010 DRY,
0011 CLEANUP,
0012 END
0013 } t_state_machine;
0014 #define t_state_machine_len (END - INIT + 1)
The define statement is a neat trick to calculate the length of the enumerator at compile time, so that it can also be used to define the length of an array.
0015 typedef t_state_machine (*trans)(void); 0016 0017 trans transitions[t_state_machine_len];
This is where we will store our transition variables. This will be incredibly quick to look-up as you’ll see.
0018 t_state_machine state_init(void){
0019 // get_towels();
0020 // full_sink();
0021 // stack_dishes();
0022 return GET_DISH;
0023 }
0024
0025 t_state_machine state_get_dish(void){
0026 // dish = pick_up_dish();
0027 // if(!dish)
0028 // return CLEANUP;
0029 // else
0030 return SCRUB;
0031 }
0032
0033 t_state_machine state_scrub(void){
0034 // if(*dish == DIRTY)
0035 // scrub(&dish);
0036 // else
0037 return RINSE;
0038 }
0039
0040 t_state_machine state_rinse(void){
0041 // if(*dish == SOAPY)
0042 // rinse(&dish);
0043 // else
0044 return DRY;
0045 }
0046
0047 t_state_machine state_dry(void){
0048 // if(*dish == WET)
0049 // dry(&dish);
0050 // else
0051 // put_away_dish(&dish);
0052 return GET_DISH;
0053 }
0054
0055 t_state_machine state_cleanup(void){
0056 /* Do some clean-up. */
0057 return END;
0058 }
0059
0060 t_state_machine state_end(void){
0061 /* NOTE: If we ever run this, we transitioned in from an error. */
0062 return END;
0063 }
There we just defined all the transition code, each nicely abstracted away into their own little functions. I believe this code would scale quite nicely as each block would only be responsible for their exit transitions.
0064 t_state_machine service(t_state_machine state){
0065 if(state < INIT || state >= END) state = END;
0066 /* We could check for bathroom break here */
0067 return transitions[state]();
0068 }
service() is a small abstraction that allows us to check
for anything abnormal. In this case we check whether state
enters into an invalid value and transition straight into
END. Here you could have some ‘watchdog’ for example to see
whether a state has failed to transition out after some time, or
transitions into an invalid state give the previous state.
The real clever thing here though is that the current state is used to immediately jump to the correct piece of code to run that state. In the switch statement in the original article you potentially introduce tonnes of branching, which is quite bad for performance on modern CPUs. For embedded systems, you still pay heavily for all these additional comparisons that need to be performed, especially if you had for example many more possible states.
0069 int main(){
0070 /* Setup */
0071 transitions[INIT] = state_init;
0072 transitions[GET_DISH] = state_get_dish;
0073 transitions[SCRUB] = state_scrub;
0074 transitions[RINSE] = state_rinse;
0075 transitions[DRY] = state_dry;
0076 transitions[CLEANUP] = state_cleanup;
0077 transitions[END] = state_end;
0078 t_state_machine state = INIT;
0079 /* Run */
0080 while(state != END){
0081 printf("state %i", state - INIT); // Debugging only
0082 state = service(state);
0083 printf(" -> state %i\n", state - INIT); // Debugging only
0084 }
0085 return 0;
0086 }
Here we setup the relevant transition states, which could even be done at compile time if we were so inclined to do so. Running the state machine is then very trivial, we just set an entry and exit condition, and loop as required.
I’m not aware of any, but for embedded systems (which the article relates to) there may be arguments against using pointers. For example, the function pointers would be stored in variable space rather than program space, meaning that it could be possible for rogue code to override the function offsets and cause some crazy behaviour. That said, if you’ve got rogue code, it may be the least of your worries.