
Woah, time flies by very fast when you’re busy! Almost three months have passed by since the last proper update and it feels at most like weeks. I’ll provide some basic feedback and address some of the previously made points. To give you an idea whether things have relaxed, this is being written in a 10 minute space between meetings whilst eating!
We have our qualification deadline announced - it’s been pulled forward even earlier than the previous year, meaning this month we really need to pull a surprise out of nowhere in order to be considered competitive. That, added to the fact that some members of the team (including myself) are extremely busy over this time, adds up to what should be a very interesting time.
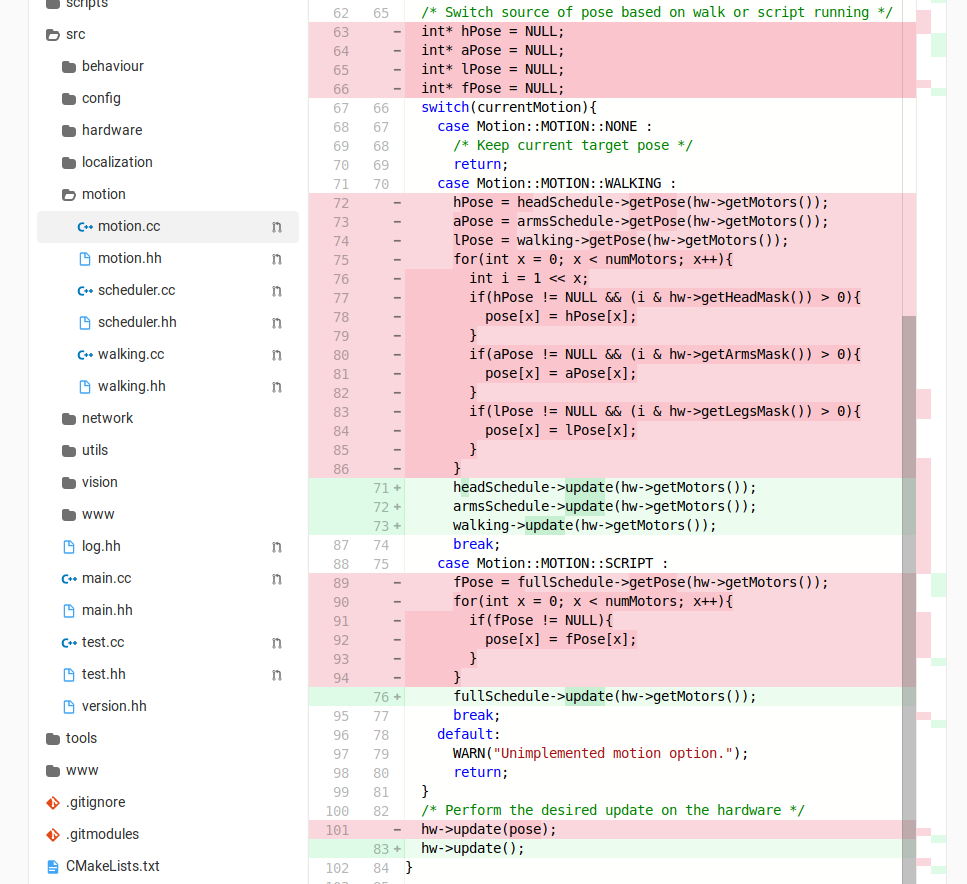
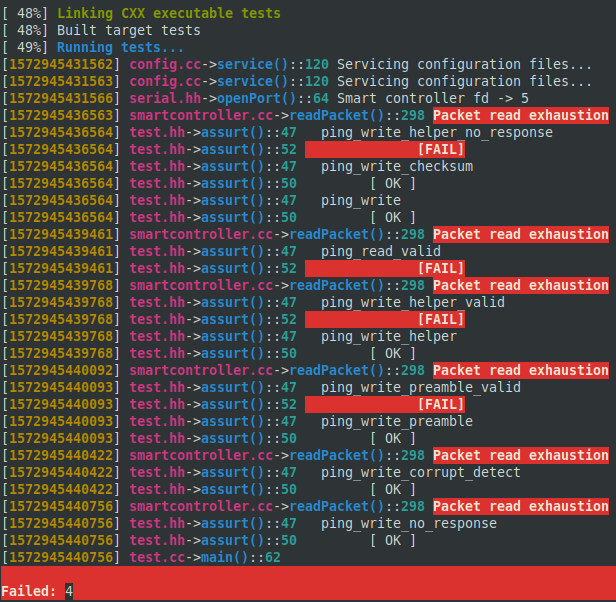
One of the things being actively worked on (this second even) is the robot’s ability to speak to the motors through two different motor controllers. This change was required after we decided to switch to using smart controllers fully, an expensive but necessary move for weight and power reasons. To call this complex is stating this lightly. The entire motor control code has been re-written and massive changes have been made to allow the probing of motors. The plus side to this is increased speed and robustness of the system.
If the testing tonight goes well, the next steps will be:
Our team is certainly capable of rising to the challenge, so the robot gods willing, we aim to fully qualify again this year.
We are getting very close on this front. Of course I can’t share results just yet, but the aim is to submit something very soon. We are currently just working on getting the experiments running, something that should be possible within the next few weeks. Watch this space!
Firstly, let’s address the points made in our previous update:
All things considered, a lot has been achieved. As we are now running ever closer towards Christmas, the plan is to wrap up the PhD work and get the RoboCup team qualified. This will be more than enough of a challenge all things considered.